
I ricercatori del MIT hanno sviluppato un sensore tattile basato su una fotocamera che è lungo, curvo e ricorda un dito umano. Il loro dispositivo, che fornisce un rilevamento tattile ad alta precisione su una vasta area, potrebbe consentire alla mano robotica di eseguire diversi tipi di presa. Immagine: per gentile concessione dei ricercatori
Scritto da Adam Ziwi | Notizie del MIT
Immagina di tenere qualcosa di pesante, come una chiave inglese, con una mano. Probabilmente manterrai la chiave usando tutte le dita, non solo la punta delle dita. I recettori sensoriali nella pelle, che corrono lungo ogni dito, inviano informazioni al cervello sullo strumento che stai impugnando.
In una mano robotica, i sensori tattili che utilizzano le telecamere per ottenere informazioni sugli oggetti afferrati sono piccoli e piatti, quindi spesso si trovano sulla punta delle dita. Questi robot, a loro volta, usano solo la punta delle dita per afferrare gli oggetti, solitamente con un movimento di pizzicamento. Ciò limita le attività di manipolazione che possono eseguire.
I ricercatori del MIT hanno sviluppato un sensore tattile basato su una fotocamera che è lungo, curvo e ricorda un dito umano. Il loro dispositivo fornisce un rilevamento tattile ad alta precisione su una vasta area. Il sensore, chiamato GelSight Svelte, utilizza due specchi per riflettere e rifrangere la luce in modo che una fotocamera, situata alla base del sensore, possa vedere lungo l’intera lunghezza del dito.
Inoltre, i ricercatori hanno costruito un sensore a forma di dito con una spina flessibile. Misurando come si piega la colonna vertebrale quando un dito tocca un oggetto, possono stimare la forza esercitata sul sensore.
Per la produzione hanno utilizzato i sensori GelSight Svelte Mano robotica Era in grado di afferrare un oggetto pesante come un essere umano, utilizzando l’intera area di rilevamento delle sue tre dita. La mano può anche eseguire le stesse operazioni di presa del disco comuni nelle pinze robotiche convenzionali.

Questa animazione mostra una mano robotica che include tre sensori GelSight Svelte a forma di dito. I sensori, che forniscono un rilevamento tattile ad alta precisione su un’ampia area, consentono alla mano di eseguire più prese, comprese le prese a pizzico che utilizzano solo la punta delle dita e le prese di potenza che utilizzano l’intera area di rilevamento delle tre dita. Credito: per gentile concessione dei ricercatori
“Poiché il nostro nuovo sensore ha la forma di un dito umano, possiamo usarlo per eseguire diversi tipi di prese per compiti diversi, invece di usare i pugni per tutto. Puoi fare molto con una pinza a mascella parallela”, afferma Alan (Jialiang Zhao, uno studente ricercatore: “Il nostro sensore apre davvero alcune nuove possibilità su diverse attività di elaborazione che possiamo svolgere con i robot”, ha affermato un senior in ingegneria meccanica e autore principale dell’articolo. carta Su GelSight Svelte.
Chow ha scritto l’articolo con l’autore senior Edward Adelson, professore di scienze della vista presso il Dipartimento di scienze del cervello e cognitive e membro del Laboratorio di informatica e intelligenza artificiale (CSAIL). La ricerca sarà presentata alla conferenza IEEE sui robot e sistemi intelligenti.
Il mio specchio, il mio specchio
Le fotocamere utilizzate nei sensori tattili sono limitate dalle dimensioni, dalla distanza focale degli obiettivi e dagli angoli di visione. Pertanto, questi sensori tattili tendono ad essere piccoli e piatti, confinati sulla punta delle dita del robot.
Con un’area di rilevamento più lunga, un’area molto simile a un dito umano, la fotocamera dovrà posizionarsi più lontano dalla superficie di rilevamento per vedere l’intera area. Ciò è particolarmente difficile date le limitazioni di dimensioni e forma della pinza robotica.
Zhao e Adelson hanno risolto questo problema utilizzando due specchi che riflettono e rifrangono la luce verso un’unica telecamera situata alla base del dito.
GelSight Svelte include uno specchio piatto e angolato situato di fronte alla fotocamera e uno specchio lungo e curvo situato lungo la parte posteriore del sensore. Questi specchi ridistribuiscono i raggi luminosi della fotocamera in modo tale che la fotocamera possa vedere lungo l’intera lunghezza del dito.
Per migliorare la forma, l’angolo e la curvatura degli specchi, i ricercatori hanno progettato un software per simulare la riflessione e la rifrazione della luce.
“Con questo software, possiamo facilmente vedere dove sono gli specchi e come sono curvati per avere un’idea di quanto sarà buona l’immagine dopo che il sensore sarà stato effettivamente prodotto”, spiega Zhao.
Gli specchi, la fotocamera e due set di LED per l’illuminazione sono fissati su un supporto in plastica e racchiusi in una pelle flessibile in gel di silicone. La fotocamera visualizza la parte posteriore della pelle dall’interno; In base alla deformazione, può vedere dove avviene il contatto e misurare la geometria della superficie di contatto dell’oggetto.
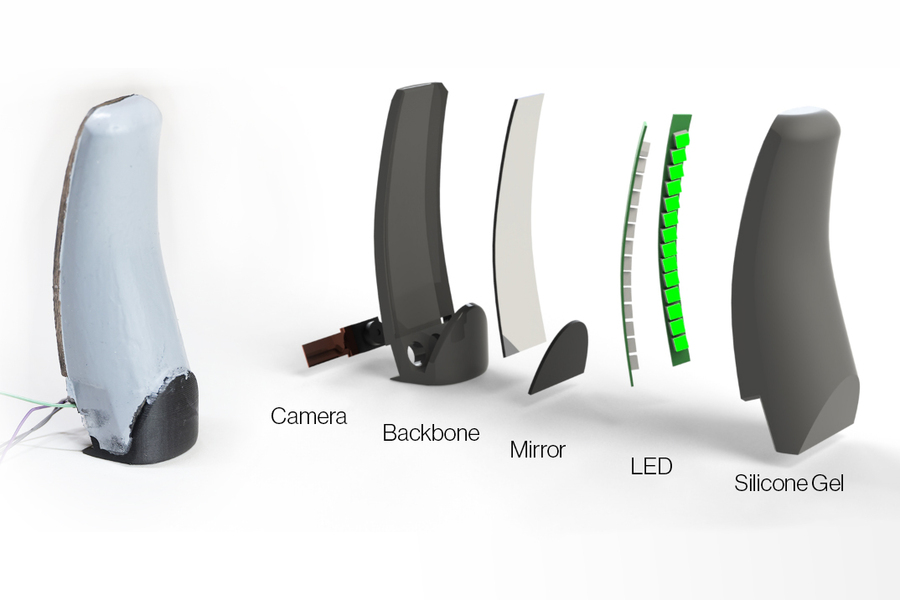
Ripartizione dei componenti che compongono il sensore tattile simile a un dito. Immagine: per gentile concessione dei ricercatori
Inoltre, le serie di LED rossi e verdi danno un’idea della profondità con cui si preme il gel quando si tiene in mano un oggetto, a causa della saturazione del colore in diverse posizioni sul sensore.
I ricercatori possono utilizzare queste informazioni sulla saturazione del colore per ricostruire un’immagine 3D profonda dell’oggetto afferrato.
Il dorso in plastica del sensore consente la determinazione delle informazioni propriocettive, come la coppia di torsione applicata al dito. La colonna vertebrale si piega e si flette quando si afferra un oggetto. I ricercatori utilizzano l’apprendimento automatico per stimare la quantità di forza applicata al sensore, in base alle deformità della colonna vertebrale.
Tuttavia, Zhao afferma che integrare questi elementi in un sensore efficace non è stato un compito facile.
“Assicurarsi di avere la giusta curvatura dello specchio per adattarla a quella che abbiamo nella simulazione è molto difficile. Inoltre, mi sono reso conto che esistono alcuni tipi di supercolla che impediscono al silicio di indurirsi. “Ci sono voluti molti esperimenti per creare un sensore che funziona davvero”, aggiunge. “.
Assorbimento versatile
Una volta perfezionato il progetto, i ricercatori hanno testato il dispositivo GelSight Svelte premendo oggetti, come una vite, in diverse posizioni sul sensore per verificare la chiarezza dell’immagine e vedere quanto bene poteva determinare la forma di un oggetto.
Hanno anche utilizzato tre sensori per costruire la mano GelSight Svelte in grado di eseguire più prese, tra cui una presa a pizzico, una presa a pizzico laterale e una presa potente che utilizza l’intera area di rilevamento delle tre dita. La maggior parte delle mani robotiche, che hanno la forma di mascelle parallele, possono afferrare solo un disco.
Una forte presa a tre dita consente alla mano robotica di afferrare un oggetto più pesante in modo più stabile. Tuttavia, tenere il disco è comunque utile quando l’oggetto è molto piccolo. Essere in grado di eseguire entrambi i tipi di presa con una mano darebbe al robot una maggiore versatilità, afferma.
In futuro, i ricercatori intendono migliorare il dispositivo GelSight Svelte in modo che il sensore sia articolato e possa piegarsi alle articolazioni, come un dito umano.
“I sensori opto-tattili delle dita consentono ai robot di utilizzare fotocamere economiche per raccogliere immagini ad alta risoluzione del contatto superficiale e, osservando la deformazione elastica della superficie, il robot stima la forma del contatto e le forze applicate”, afferma Monroe Kennedy III, un assistente Professore di ingegneria meccanica presso l’Università di Stanford, che ha partecipato a questa ricerca. “Migliorare il senso del tatto di un robot per avvicinarsi alle capacità umane è una necessità e potrebbe essere il problema motivante per lo sviluppo di robot in grado di eseguire compiti complessi e abili.”
Questa ricerca è supportata in parte dal Toyota Research Institute.

Notizie del MIT

Federico Caruso è autore per Gossipitaliano.net e si occupa di seguire l’attualità con un approccio chiaro, accurato e orientato ai lettori. Scrive su temi che spaziano dalle notizie di cronaca e politica al business, dalla tecnologia allo sport, fino all’intrattenimento e al lifestyle. Il suo obiettivo è offrire informazioni affidabili, spiegazioni comprensibili e approfondimenti sui fatti e sulle storie che hanno un impatto concreto sulla vita quotidiana e sull’interesse del pubblico.